OSAKA (JAPAN), 24 april 2014 12:05
Pneumatische robot-viervoeter doet eerste stapjes (video)
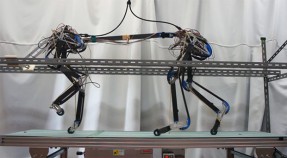
Pneupard is een bio-geïnspireerde viervoetige robot die wordt aangedreven door pneumatische spieren. De bouwers van Osaka University hebben de robot nu de eerste stapjes laten nemen.
Het laten lopen van een viervoetige pneumatische robot is geen simpele opdracht. De onderzoekers in Osaka moesten de luchtdruk van elke ‘spier’ individueel fine-tunen om de beweging te verkrijgen. Hoe meer pneumatiek je toevoegt aan de benen, hoe krachtiger de robot wordt, maar het systeem wordt er ook veel complexer door.
Twee versies
De Japanse onderzoekers liepen tegen het complexiteitsprobleem aan en besloten terug te keren naar de tekentafel. De nieuw ontworpen viervoeter in het filmpje hieronder is volgens een simpeler principe ontworpen. Dit maakte het aansturen van de machine en het verkennen van verschillende manieren van lopen simpeler.
Loopband
In één van de eerste experimenten is te zien dat de robot van 4,8 kilo op een loopband loopt. De robot wordt ondersteund om te zorgen dat hij niet opzij valt.
“Wij geloven dat een loopbeweging niet alleen door het brein, maar ook door de hersenstam, ruggengraat en spieren wordt gemaakt. Deze hebben ook ‘een zegje’ in hoe het lichaam beweegt”, volgens projectleider Andre Rosendo.
Simpel brein
De robot beweegt zichzelf niet zozeer voort met een complex brein, maar vooral door de fysieke interactie van de skeletstructuur en ‘spieren’, die worden aangestuurd door een simpele ‘central pattern generator’ (CPG).
bron: IEEE Spectrum
Foto's: